 When Interval Research was founded the original
24 members of the research staff were challenged
by David Liddle to "create something
as different from the personal computer as
it was from the mainframe".
When Interval Research was founded the original
24 members of the research staff were challenged
by David Liddle to "create something
as different from the personal computer as
it was from the mainframe".I thought about this, in a structural manner, and concluded that the right way to proceed was by systematically inverting a number of the media theoretic elements of what a personal computer (or work-station) was (circa 1993).
A work-station:
- Communicates to people via a two and a half dimensional grid of semantic relations (i.e., the desktop metaphor).
- Has a paucity of input senses - a keyboard and mouse.
- Is fixed in space - it sits on a desk.
- Constrains the body of the user to a cramped posture and limited set of gestures.
- There is one work-station per user.
- Communicate emotionally - facial expressions, affective sound, bodily gestures.
- Use multiple sensory modalities that are shared by humans - including vision, touch, and hearing.
- Make something that can move around independently.
- Have it move/experience/act through the same physical and social spaces as people do.
- Make lots of them - and have them exhibit flocking behavior.
 I argued against simulation of such, because
people would inevitably react differently
to something on a screen as opposed to an
entity with a body in space. Therefore building
real physical robots was deemed essential
in order to create a joined system where
people were the environment for the robots,
and vice versa, and we could ask such questions
of people as what is the robot feeling?
I argued against simulation of such, because
people would inevitably react differently
to something on a screen as opposed to an
entity with a body in space. Therefore building
real physical robots was deemed essential
in order to create a joined system where
people were the environment for the robots,
and vice versa, and we could ask such questions
of people as what is the robot feeling?When the project was started, it was in uncharted territory - no one else was doing anything similar. The patent search for the background intellectual property uncovered only a few remotely relevant pieces of intellectual property - a flocking patent, a game patent, and a few others.
My grand strategic goal for the project was to do a strong design statement, that would produce design heuristics that others could emulate. Such a strong design statement could be subsequently relaxed from its initial purity of expression to find use in other areas, such as adding affective communication into workstations - in other words, one would not have to always make a full up robot to take advantage of the understandings produced by first building an emotionally communicating robot.
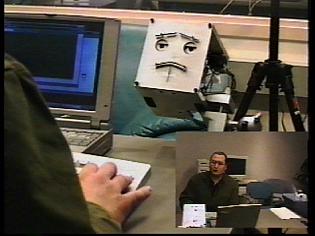 |
| John Pinto in the Aquarium lab controlling the Mark One "Severed Head" |
Then we proceeded to build a full up robot.
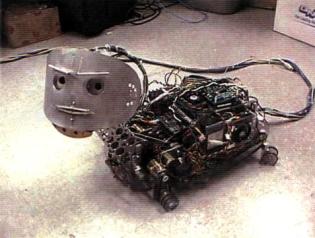 The end result, four years later, was a prototype
robot that had an expressive face, a mobile
body with a articulated neck and head; gestures
that emulated the ballistic motions of animal
gestures; a sense of touch that differentiated
between a caress, a light contact, and a
blow (using sub-modalities of an accelerometer
and a capacitive sensor); stereo color vision
that located peoples bodies in space and
tracked them via 3D blob analysis; had male
or female gendered emotionally expressive
audio - and implemented an internal emotional
state machine that emulated the seven basic
expressive emotions described by Charles
Darwin in in The Expression of the Emotions in Man and
Animals.
The end result, four years later, was a prototype
robot that had an expressive face, a mobile
body with a articulated neck and head; gestures
that emulated the ballistic motions of animal
gestures; a sense of touch that differentiated
between a caress, a light contact, and a
blow (using sub-modalities of an accelerometer
and a capacitive sensor); stereo color vision
that located peoples bodies in space and
tracked them via 3D blob analysis; had male
or female gendered emotionally expressive
audio - and implemented an internal emotional
state machine that emulated the seven basic
expressive emotions described by Charles
Darwin in in The Expression of the Emotions in Man and
Animals. 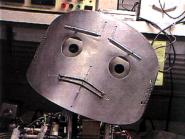 By 1998 others had started to work in the
same general area. Some of these poured far
more resources into their engineering - notably
Sony with the Aibo robotic dog. In the annual
project review I argued that we should either
spin the project out of Interval as a development
effort aimed at real products in the toy
market with enough resources to succeed,
or we should kill the project. In the end,
I killed my own dog - the project was ended.
By 1998 others had started to work in the
same general area. Some of these poured far
more resources into their engineering - notably
Sony with the Aibo robotic dog. In the annual
project review I argued that we should either
spin the project out of Interval as a development
effort aimed at real products in the toy
market with enough resources to succeed,
or we should kill the project. In the end,
I killed my own dog - the project was ended.Mark Scheeff, the member of the research staff who did the mechanical design for the robot, followed on with a six month "cremator project" He ripped all of the AI out of the system, and turned the robot into a tele-operated puppet, to explore what people perceived about the robot, not knowing what it was "under the hood" - i.e, what they projected onto the media surface. He exhibited it at the Tech Museum in San Jose, and members of the project under his leadership published a paper summarizing the results from this exploration of projective intelligence:
Proceedings of the Workshop on Interactive Robotics and Entertainment (WIRE-2000): Experiences with Sparky, a Social Robot, Mark Scheeff, John Pinto, Kris Rahardja, Scott Snibbe, Rob Tow .
The other tangible result from the project was a very broad patent (and a subsequent improvement patent with the same title) covering emotional communication between real robots with actual bodies with each other and with people:
- Tow, R. Affect-based Robot Communication Methods and Systems - U.S. Patent No 5,832,189, November, 1998.
- Tow, R. Affect-based Robot Communication Methods
and Systems - U.S. Patent No 6038493, March, 2000. This
was a continuation of the first robot patent
above, emphasizing claims related to actual
bodies in space as opposed to simulated bodies.